国通17级学生张以远等成功申请以机械原理课程设计为基础的实用新型专利
专利名称:基于尺蠖的仿生软体机器人
团队成员:组长 张以远
组员 祝志洋、郑佳、张经直
专利证书:
项目介绍:
现有的爬行机器人分类
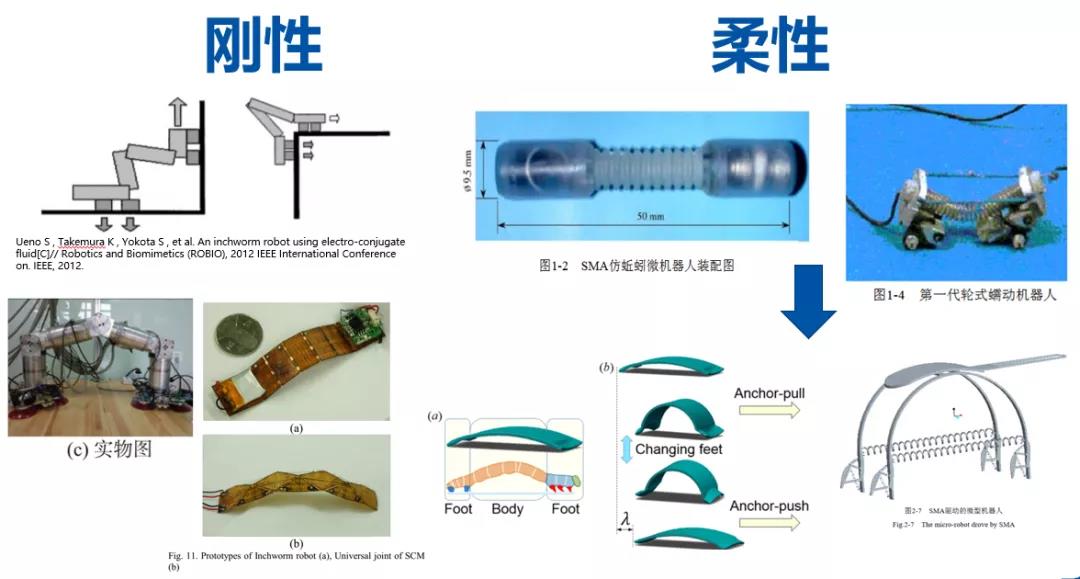
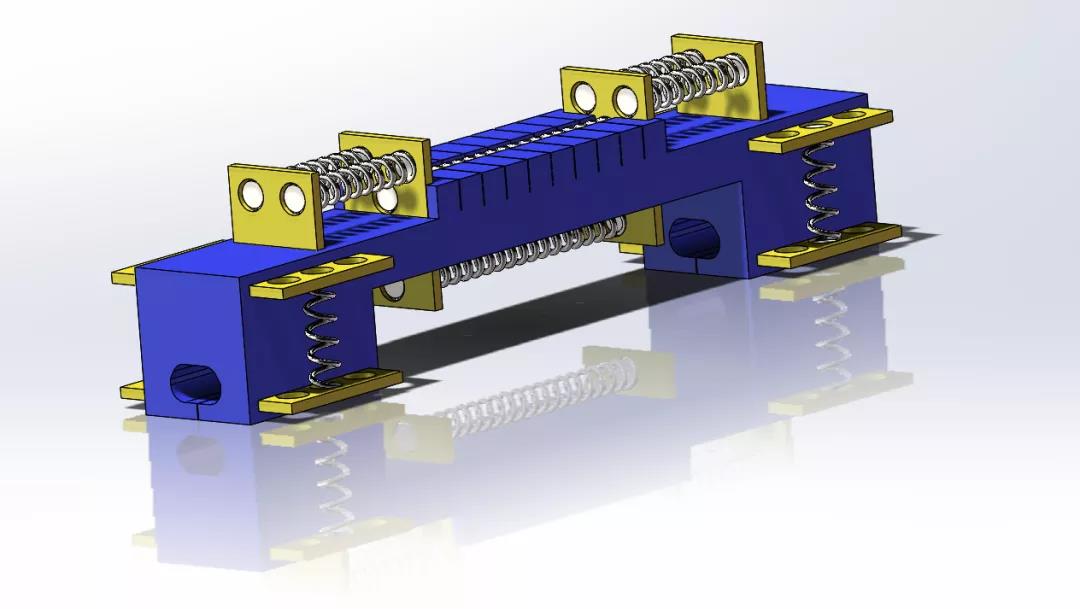
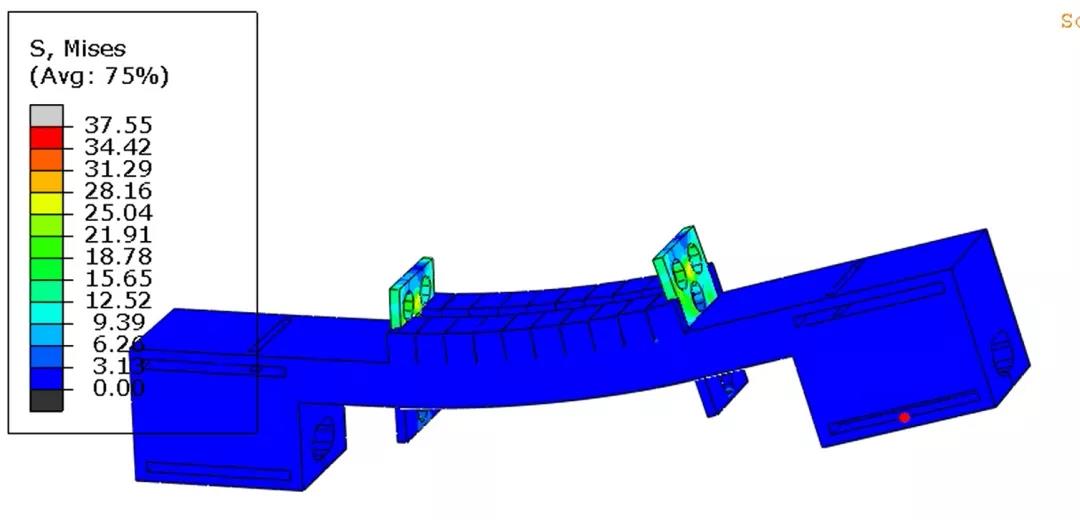
目前市场上已有的爬行仿生机器人主要分为刚性和柔性两大类。在国际通用工程学院的机械原理课上,本学生团队受到启发,参考前人的研究成果,基于自身经历,设计一种模仿尺蠖爬行的软体机器人。在史震云老师指导的实验室中,学生们接触到了以硅胶为躯干、以形状记忆合金弹簧为肌肉的仿生机器人概念,并以此为思路,在SolidWorks上设计出第一代样机,对其进行了大量的仿真分析。
在经过实验论证后,团队根据已有数据设计并制作出第二代样机。
 |
| 第一代 |
 |
| 第二代 |
在国际通用工程学院机械原理课程结束后,学生在完成课程设计的同时,申请了国家专利,并于今年2月份收到了国家专利授权通知书。
心路历程
在设计阶段,由于前期大量的背景调查,学生们极大拓宽思路,选定设计方向,确定第一代样机的设计细节。在研发前期,广泛地获取相关信息,让他们对目标有更清晰的认识,使设计更加合理。
在样机制作过程中,受制于技术,学生们手工制作软体机器人抓握部分,最终选定采用毛刷毛仿生刚毛,并将剪短的刷毛“种”在万用电路板上,将万用电路板嵌入硅胶软体。

 |
| 抓握实验 |
 |
| 嵌入实验 |
 |
| 第一代样机的硅胶注模 |
在数个子实验和第一代样机实验后,学生们制作出第二代样机,做基于Arduino的控制实验。第二代样机至少需要9根记忆合金弹簧。在电路控制下,不同组的记忆合金弹簧交替有序地通电工作,样机开始蠕动。
